Tutorial: Gait and Trajectory Optimization for Legged Robots

57:10
Gerardo Bledt (MIT): Generalizing and improving regularized predictive control for legged robots

57:03
Alman Sanayisi Neden Çöküyor?

48:52
Keynote speech Marco Hutter ICRA 2022

26:11
Talk 09: L. Marchioni, PAL Robotics | ICRA2021 WS on Legged Robots

46:40
Introduction to Trajectory Optimization
6:57
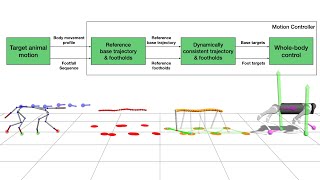
Animal Motions on Legged Robots Using Nonlinear Model Predictive Control - IROS 2022 Presentation

17:55
Path Planning with A* and RRT | Autonomous Navigation, Part 4

2:05:38