Lecture 2 - 2.3: Roll, Pitch, Yaw angles (Robotics UTEC 2018-1)

6:09
Lecture 2 - 2.4: Quaternions (Robotics UTEC 2018-1)

17:38
Correct Explanation of Yaw, Pitch, and Roll Euler Angles with Rotation Matrices and Python Code
12:56
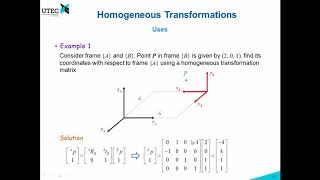
Lecture 2 - 3: Homogeneous Transformations (Robotics UTEC 2018-1)

12:28
3 3 Euler Angles University of Pennsylvania Coursera

30:16
Robotics 1 U1 (Kinematics) S5 (HTM) P2 (HTM by Denavit Hartenberg)

19:52
Dentro del cañón V3 London
16:08
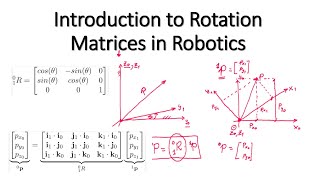
Introduction to Rotation Matrices in Robotics

22:01