Robotics 2 U1 (Kinematics) S3 (Jacobian Matrix) P2 (Finding the Jacobian)
13:43
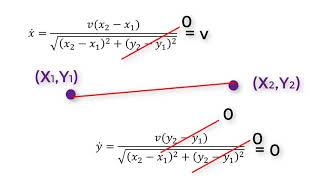
Robotics 2 U1 (Kinematics) S4 (Path Planning) P1 (Using the Jacobian)

22:01
Robotics 1 U1 (Kinematics) S3 (Rotation Matrices) P1 (Rotation Matrices)

26:36
Robotics 2 U1 (Kinematics) S3 (Jacobian Matrix) P1 (Intro and Lab)

20:21
Jacobian Matrix and Singularities | Robotics | Introduction | Part 1

30:16
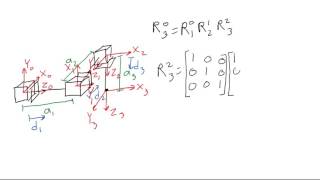
Robotics 1 U1 (Kinematics) S5 (HTM) P2 (HTM by Denavit Hartenberg)
40:21
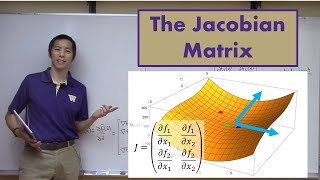
The Jacobian Matrix

1:41:55
6 Axis Robot Forward & Inverse Kinematics Tutorial - Denavit Hartenberg Parameters With the AR4-MK2
27:05