Robotics 1 U1 (Kinematics) S3 (Rotation Matrices) P1 (Rotation Matrices)
17:01
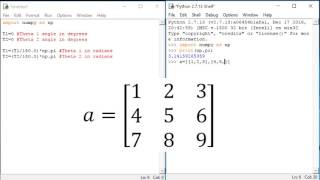
Robotics 1 U1 (Kinematics) S3 (Rotation Matrices) P2 (Rotation Matrices in Python)

30:16
Robotics 1 U1 (Kinematics) S5 (HTM) P2 (HTM by Denavit Hartenberg)
11:14
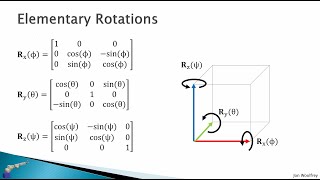
2.3 Rotations in 3D
15:38
Robotics 1 U1 (Kinematics) S4 (Displacement Vectors) P1 (Displacement Vectors)
10:40
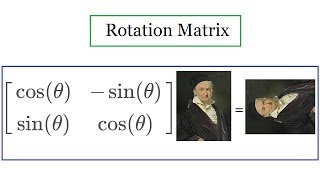
Rotation Matrix

3:01
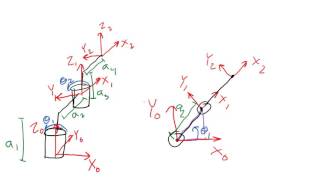
Denavit-Hartenberg Reference Frame Layout
5:59
Quaternions and 3d rotation, explained interactively

1:41:55