Robotics 1 U1 (Kinematics) S3 (Rotation Matrices) P4 (6-DoF Example and Error Checking)
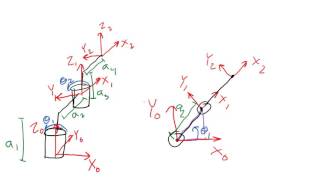
15:38
Robotics 1 U1 (Kinematics) S4 (Displacement Vectors) P1 (Displacement Vectors)

22:01
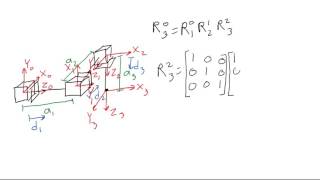
Robotics 1 U1 (Kinematics) S3 (Rotation Matrices) P1 (Rotation Matrices)

46:13
Robotics 1 U1 (Kinematics) S6 (Inverse Kinematics) P1 (Inverse Kinematics)

31:07
Robotics 1 U1 (Kinematics) S5 (Homogeneous Transformation Matrix) P1 (HTM from Rotation Matrix)

30:16
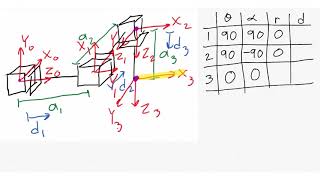
Robotics 1 U1 (Kinematics) S5 (HTM) P2 (HTM by Denavit Hartenberg)
17:01
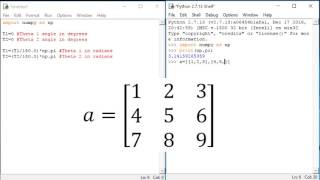
Robotics 1 U1 (Kinematics) S3 (Rotation Matrices) P2 (Rotation Matrices in Python)
27:05
Robotics 1 U1 (Kinematics) S3 (Rotation Matrices) P3 (Rotation Matrix Examples)
36:26