Hydraulic circuit design (Part II)

1:05:17
Fundamentals of Inverse Kinematics of an Industrial Robot

41:09
Dynamics of an Industrial Serial Robot using Newton-Euler (NE) Approach

6:05
Tumbler trouble.

1:27:46
Process Control L1 | GATE Instrumentation Engineering Online Lectures | GATE IN Free Lectures
58:52
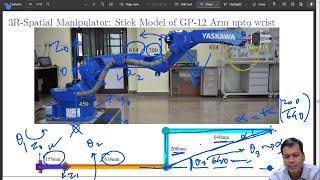
Inverse Kinematics of a 6-DoF Industrial Robot (Yaskawa GP12)

7:07
NPTEL Course Introduction: Industrial Robotics - Theories for Implementation

3:20
Position Control of a Hydraulic Cylinder using Servo Proportional Valve

26:59