Fundamentals of Inverse Kinematics of an Industrial Robot
58:52
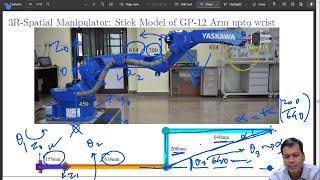
Inverse Kinematics of a 6-DoF Industrial Robot (Yaskawa GP12)

1:09:39
Statics of Serial Chain Industrial Robots

5:12
COBOTS : Theory and Practice, NPTEL/Swayam Course Introduction

41:09
Dynamics of an Industrial Serial Robot using Newton-Euler (NE) Approach

29:27
KUKA Kinematics Configuration

32:32
TrussAnalysis1 1

22:59
The Dome Paradox: A Loophole in Newton's Laws

5:38