Spatial Descriptions and Transformation Matrices for Robotic Manipulators

8:58
Spacial Descriptions and Transformations - Worked Example
16:08
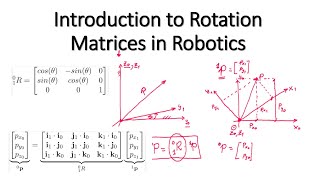
Introduction to Rotation Matrices in Robotics

15:46
Frame Assignment For Robotic Manipulators - Direct Kinematics I

22:01
Robotics 1 U1 (Kinematics) S3 (Rotation Matrices) P1 (Rotation Matrices)

20:21
Jacobian Matrix and Singularities | Robotics | Introduction | Part 1
50:52
#3 Kinematics | Coordinate Transformations | Introduction to Robotics

12:28
3 3 Euler Angles University of Pennsylvania Coursera

5:05