Intro2Robotics Lecture 8: Inverse Kinematics
24:19
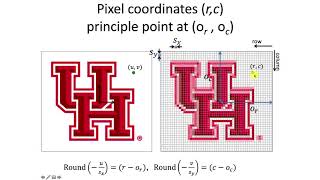
Intro2Robotics Lecture 15: Computer Vision, world frame to camera frame to pixel coordinates
15:19
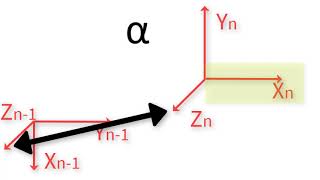
Robotics 2 U1 (Kinematics) S2 (Denavit-Hartenberg) P3 (Parameter Table)

12:32
Intro2Robotics Lecture 7b: Forward to Inverse Kinematics example

30:01
Intro2Robotics Lecture 16: Stereo Vision and Vanishing Points

17:22
Alcaraz vs. Sinner - Ein Match für die Ewigkeit! Die letzten Minuten im Relive | Roland-Garros 2025

20:19
High Precision Speed Reducer Using Rope
1:33:00
Olasılık, Rastgelelik ve Matematik Felsefesi – Prof. Dr. Ali Nesin

6:55