The safe gradient flow: a system-theoretic approach to anytime constrained optimization.

51:16
Optimization-Based Control and Planning for Agile Legged Robots

1:07:41
Learning-based Koopman modeling for efficient state estimation and control of nonlinear processes
1:18:31
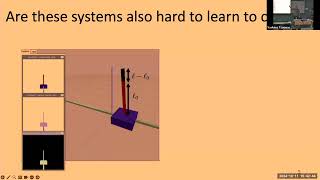
What makes learning to control easy or hard?

1:01:32
Hierarchical Optimization-Based Control for Agile and Adaptive Legged Robots

4:13
T-Flex: Compliant Flexure-based Large Range Precision Hexapod

58:18
Advanced, Adaptive and Flexible Algorithms for Decentralized Optimization

57:22
Cybersecurity and Quantum Computation in Control of Cyberphysical Systems for Next-Generation Mfg
1:14:20