Lecture 3 2: Hector Mapping - Simultaneous Localization and Mapping
17:11
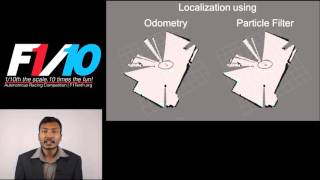
Lecture 3.3: Adaptive Monte Carlo Localization

16:22
Understanding SLAM Using Pose Graph Optimization | Autonomous Navigation, Part 3

14:11
Understanding SLAM (Simultaneous Localization And Mapping)

5:22
ROS - Google Cartographer, Hector SLAM and GMapping SLAM

14:10
Simultaneous Localization And Mapping (SLAM)

4:41
Controlling Self Driving Cars

5:44
How to Make an Autonomous Mapping Robot Using SLAM

11:35