Exploiting Representational Sparsity to Improve 3D Object Detector Runtime on Embedded Systems

24:48
[3D-DLAD-v4] Strategies and methods for automotive sensor fusion, Robert Laganiere

43:49
Current Approaches and Future Directions for Point Cloud Object Detection in Intelligent Agents

17:39
Modern methods of visual localization : Martin Humenberger

57:04
3D | Deep Learning for 3D Vision

22:59
Le paradoxe du dôme : une faille dans les lois de Newton
33:31
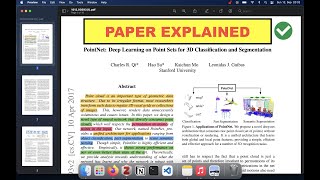
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation (PAPER EXPLAINED)

1:02:40
Philipp Krähenbühl - Point-based object detection

25:09