Compound Transformation Matrices and Inverse Transformation Matrices - Robotic Basics

4:41
Fixed and Euler Angle Representation for Rotation Matrices

22:01
Robotics 1 U1 (Kinematics) S3 (Rotation Matrices) P1 (Rotation Matrices)

8:58
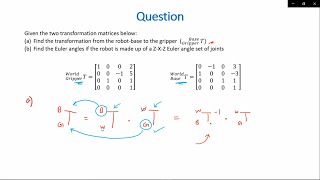
Spacial Descriptions and Transformations - Worked Example

14:28
Forward and Inverse Kinematics Part 1
24:46
Homogeneous Transformation Matrices in Robotics | Fundamentals of Robotics | Lesson 14

25:18
1 1 5 Lecture Video 1 of 1 Homogeneous Transformation Matrix Example and Coordinate Transformation
16:08
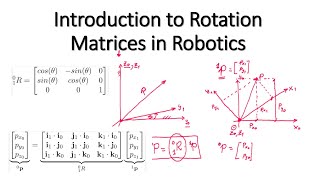
Introduction to Rotation Matrices in Robotics
10:46