Use Nullclines to Sketch the Phase Portrait for a Linear System of ODEs, Solve w/ Matrix Exponential

13:20
Explain why B = {v1, v2, v3} is a Basis for ℝ^3, Find Coordinate Vector [x]B of x Relative to B

14:14
Linear Systems ODEs Nullclines

15:32
The Matrix Exponential
14:36
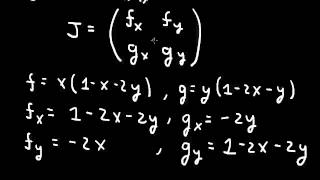
Nonlinear odes: fixed points, stability, and the Jacobian matrix

10:43
Phase Portraits for Linear Systems - Part 1
15:02
Ordinary Differential Equations 20 | Matrix Exponential

24:59
Nullclines, Equilibria, and Phase Portrait for a Nonlinear System of Differential Equations

20:01