Marco Hutter: Towards Autonomy for ANYmal [ICRA 2020 WS - Legged Robots]

49:31
MIT Robotics - Marco Hutter - Robots in the wild

22:12
[09] M. Hutter, 6th Workshop on Legged Robots ICRA'22
21:18
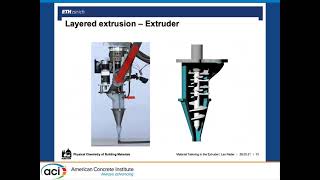
Material Tailoring in The Extruder, Controlling Hydration, and Rheology

27:41
Talk 10: J. Hurst, Agility Robotics | ICRA2021 WS on Legged Robots

58:39
Autonomy Talks - Kim Wabersich: A safety filter for learning-based control of constrained systems

20:23
Cómo se Fabrica un Bit Cuántico | Átomos Artificiales

17:53
La Increíble Ingeniería de las Resonancias Magnéticas

22:45