Intro2Robotics Lecture 7c: Forward to Inverse Kinematics example
19:42
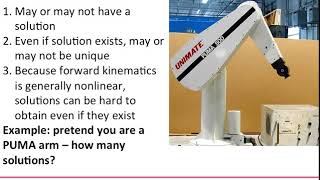
Intro2Robotics Lecture 8: Inverse Kinematics

1:41:55
6 Axis Robot Forward & Inverse Kinematics Tutorial - Denavit Hartenberg Parameters With the AR4-MK2

12:32
Intro2Robotics Lecture 7b: Forward to Inverse Kinematics example

15:46
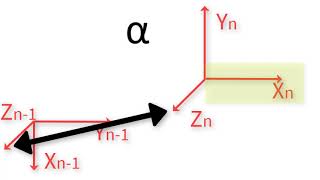
Frame Assignment For Robotic Manipulators - Direct Kinematics I
15:19
Robotics 2 U1 (Kinematics) S2 (Denavit-Hartenberg) P3 (Parameter Table)
41:23
Manipulability and Optimizing Joint Velocity, Intro2Robotics lecture 25

15:28
Intro2Robotics Lecture 9a: Inverse Kinematics Position

18:22