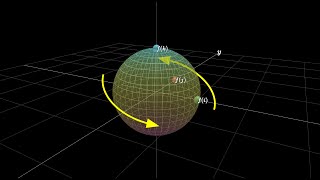
2.3 Rotations in 3D
9:46
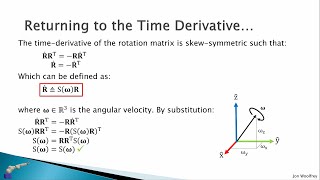
2.4 Derivatives of the Rotation Matrix
11:45
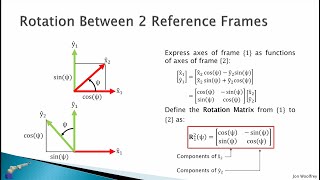
2.2 Rotation Matrices

22:01
Robotics 1 U1 (Kinematics) S3 (Rotation Matrices) P1 (Rotation Matrices)
5:59
Quaternions and 3d rotation, explained interactively

29:57
Euler's Formula Beyond Complex Numbers

18:21
Math for Game Developers: Why do we use 4x4 Matrices in 3D Graphics?
8:07
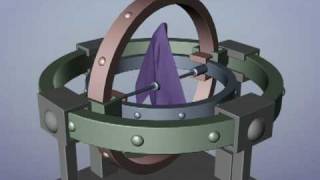
Euler (gimbal lock) Explained
2:21:46