Vector de Rotación o Representación Equivalente de Ángulo - Eje en Robótica

10:17
Cuaterniones en Robótica
17:17
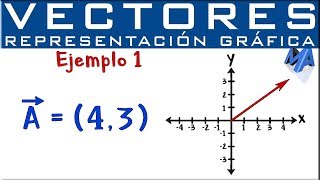
Representación gráfica de Vectores por componentes

29:56
Ángulos de Euler: Explicación y Ejemplos.

8:33
Axis-angle representations

25:14
Explicación de los Ángulos ROLL-PITCH-YAW mediante la solución de un Ejemplo.

56:26
TRANSFORMACIONES ISOMÉTRICAS - VECTORES, ROTACIÓN, TRASLACIÓN Y REFLEXIÓN | Geometría | PARTE 3/3

21:30
3. Fundamentos de robótica. Posición y Orientación (Vector de traslación y matriz de rotación)

26:26