Stability and Causality of LTI Systems Described by Difference Equations

10:12
Inverse Systems for LTI Systems Described by Difference Equations
13:20
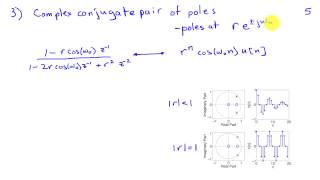
Impulse Response and Poles and Zeros
11:13
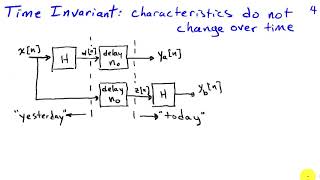
Linear, Time-Invariant, and Causal Systems

20:46
What is an Eigenvector?

25:05
Ranking Paradoxes, From Least to Most Paradoxical

13:34
John Oliver: The 60 Minutes Interview

13:48
How To Learn Any Skill So Fast It Feels Illegal

20:59