Complementary Filter - Sensor Fusion #2 - Phil's Lab #34

15:37
Extended Kalman Filter - Sensor Fusion #3 - Phil's Lab #37
11:13
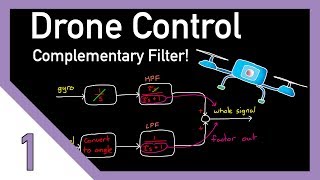
Drone Control and the Complementary Filter

19:48
IIR Filters - Theory and Implementation (STM32) - Phil's Lab #32

14:50
Accelerometers and Gyroscopes - Sensor Fusion #1 - Phil's Lab #33

8:54
Germany’s Far-Right Comeback | NYT Opinion

9:43
Sensor Fusion (MPU6050 + HMC5883L) || Kalman Filter || Measure Pitch, Roll, Yaw Accurately

30:35
FIR Filter Design and Software Implementation - Phil's Lab #17

40:20