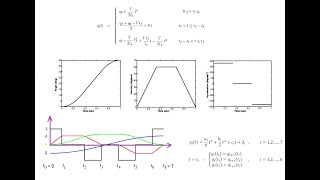
Trajectory Planning and Generation | Cubic Polynomials | Parabolic Blends | Robotics

20:21
Jacobian Matrix and Singularities | Robotics | Introduction | Part 1

46:40
Introduction to Trajectory Optimization
1:20:01
Trajectory Generation

15:31
Lagrangian Mechanics (Torques and Forces) | Robotics | Part 5

1:38:21
Robot Motion Planning using A* (Cyrill Stachniss)
29:29
Lecture 29 - Introduction to trajectory generation

38:37
Lecture 21 Trajectory planning part 1

5:49